手眼标定
1.定义
手眼标定(hand-eye calibration)是将视觉系统与机器人之间的坐标系统对齐的关键步骤。其作用在于建立相机与机器人之间的坐标转换关系,以便将相机捕获的物体位置信息准确地映射到机器人操作的坐标系中。手眼标定能够提升机器人的精确性和稳定性,使其在复杂环境下执行精确的抓取和操作任务。
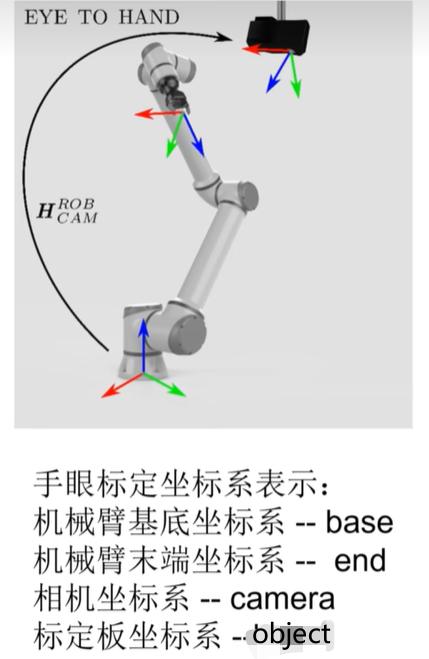
2.眼在手外(eye to hand)
![image]()
求解目标:
base基座坐标系到camera相机坐标系的变换矩阵
标定方法:
1.将标定板固定到机械手末端
2.使用相机拍照不同的姿态下拍标定板n 张(n>3)
![image]()
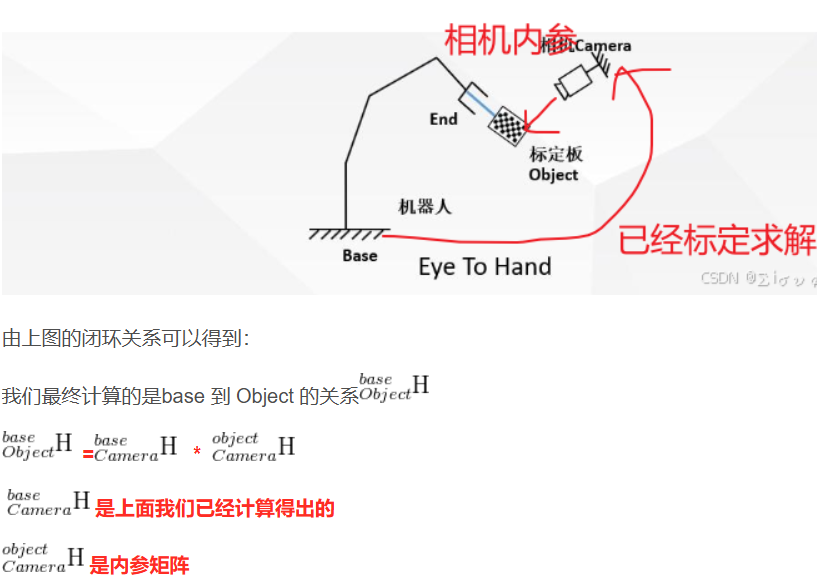
数学推导
- 机械臂末端end与标定板object固定。
![image]()
2.得到闭环关系
HobjectEnd=HbaseEnd∗Hcamerabase∗Hobjectcamera
H1baseEnd∗H1camerabase∗H1objectcamera=H2baseEnd∗H2camerabase∗H2objectcamera
H2base′End∗H1baseEnd∗H1camerabase=H2camerabase∗H2objectcamera∗H1object′camera
- 转换成了一个 AX=XB的四元数求解过程
![image]()
![image]()
![image]()
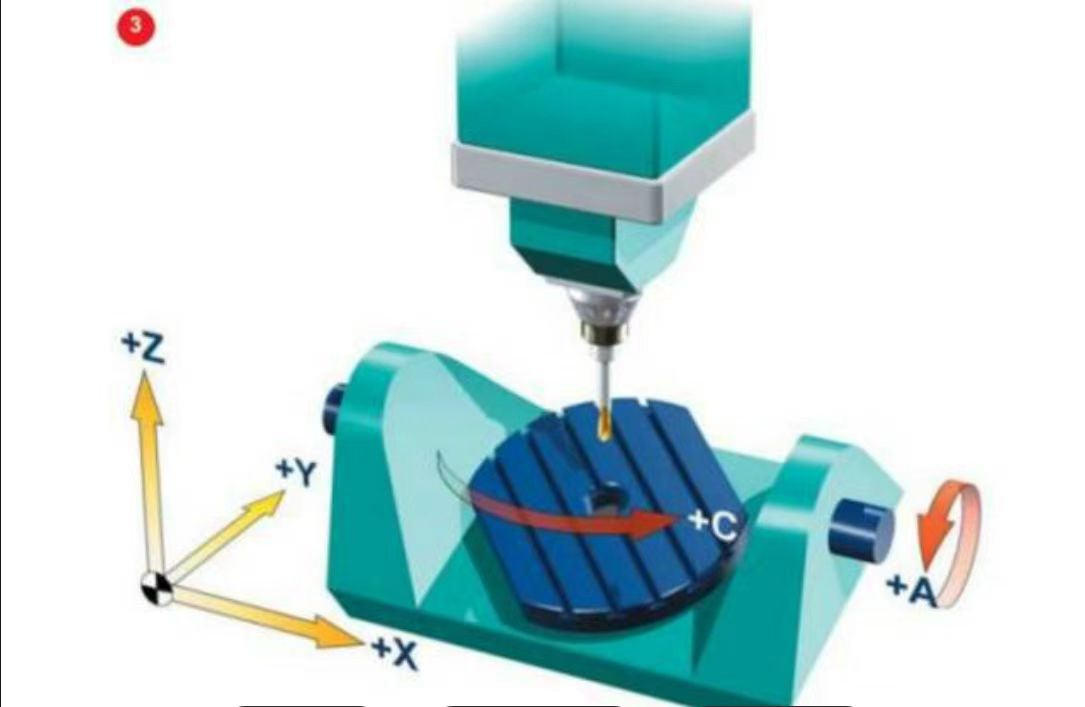
特殊场景标定任务
AC认为是机械臂的两个轴,C轴所在平面认为是机械臂的末端。
根据公式得出标定流程如下:
1.标定相机内参
2.在末端上放置二维码之类的标志物,标定板放不下
3.从设备中读取AC轴到XYZ的变换矩阵、角度等
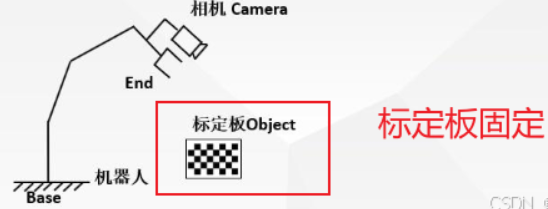
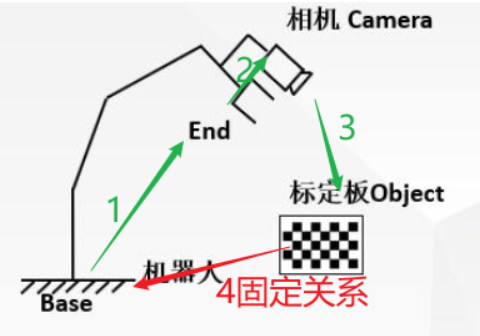
3.眼在手上(eye in hand)
求解目标:
机械臂末端end到相机坐标系camera的变换矩阵
标定方法:
1.将标定板固定到一个相对base固定的地方
![image]()
2.使用机械臂拍摄不同姿态下的标定板n张
数学推导
1.基座坐标系(base)和标定板(object)是固定的
![image]()
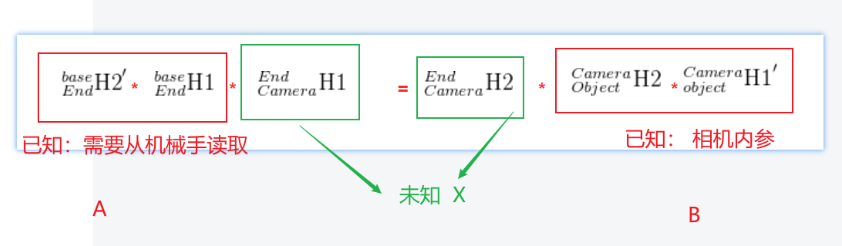
2.得到闭环关系
Hobjectbase=Hendbase∗Hcameraend∗Hobjectcamera
H1endbase∗H1cameraend∗H1objectcamera=H2endbase∗H2cameraend∗H2objectcamera
H2’endbase∗H1endbase∗H1cameraend=H2cameraend∗H2objectcamera∗H1’objectcamera
3.转换成AX=XB的方程进行求解
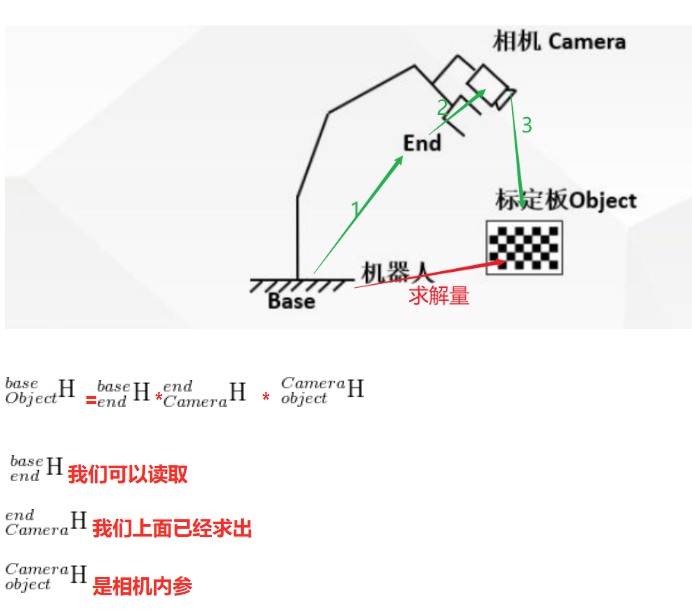
![image]()
我们最终计算的是base 到 Object 的关系
![image]()