jetson nano运行Astra相机
Astra相机
使用ros-astra-camera包
- 安装libuvc
1 | git clone https://github.com/libuvc/libuvc.git |
- 安装udev
1 | cd ~/ros_ws |
- 编译运行
1 | catkin_make |
运行报错
启动相机能够正常启动,但是一到打开depth就报错
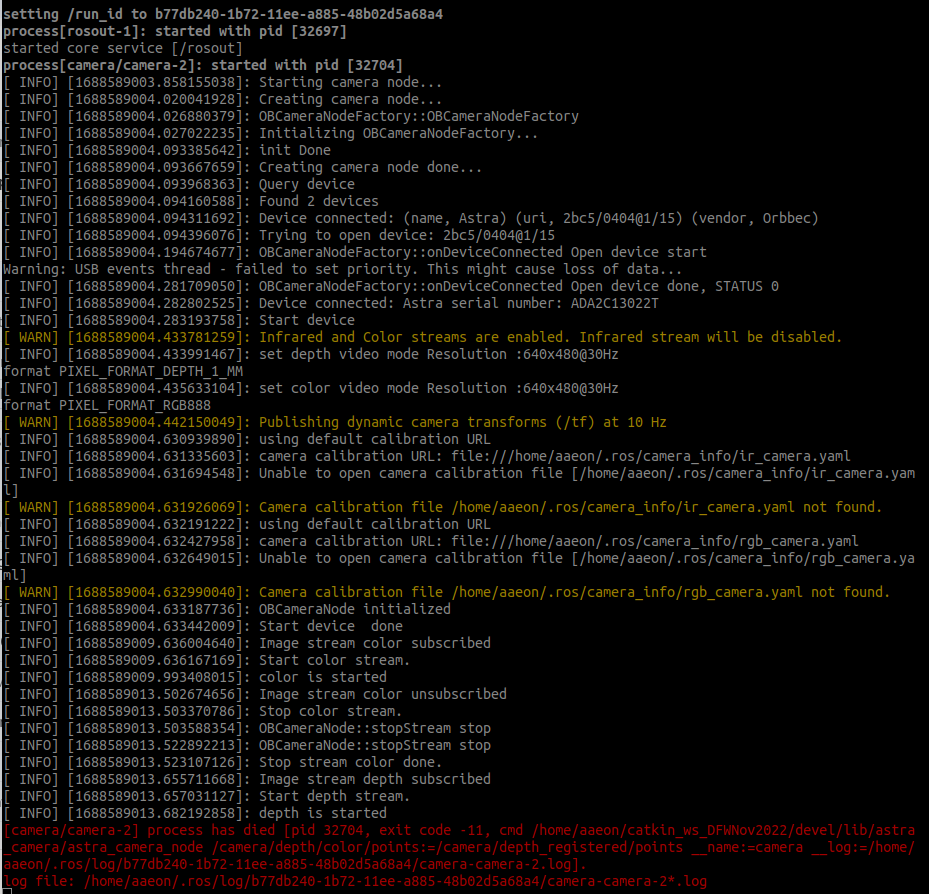
原因是同目录下需要额外的ros_bridge一起编译,使ros环境不使用自带cv_bridge
https://github.com/orbbec/ros_astra_camera/issues/189#issuecomment-1687006729