Cartographer 记录
Cartographer 记录
一、安装记录
-
遇到abseil安装失败的情况下
到/usr/local/lib lib/pkgconfig /usr/local/stow/absl 下把absl相关的文件全部删除
再重新安装
-
使用脚本自动安装和carto里面的script是一致的
二、 运行记录
-
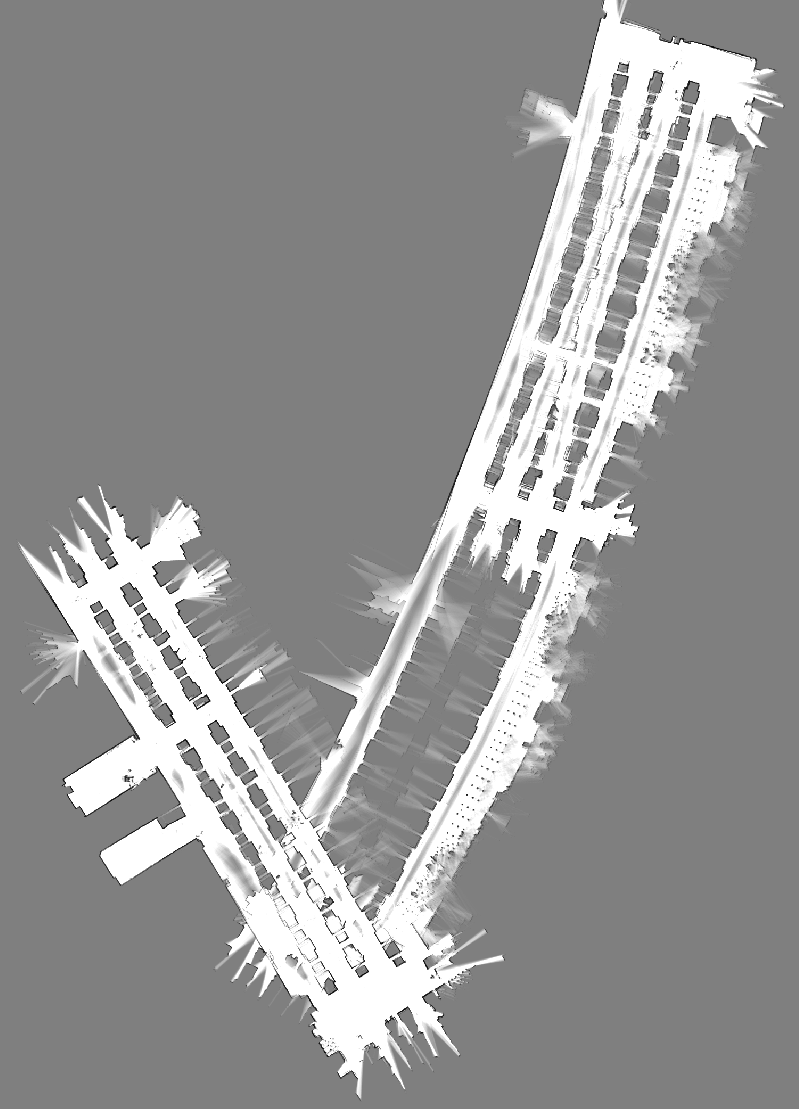
运行纯laser scan建图
首先编写launch文件 其中加载configuration_files路径下的lua配置文件
其中的remap中的to话题需要更改为bag中的laser的topic
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23<launch>
<!-- bag的地址与名称 -->
<!-- <arg name="bag_filename" default="$(env HOME)/bagfiles/rslidar-outdoor-gps-notf.bag"/> -->
<arg name="bag_filename" default="$(env HOME)/bagfiles/slam-filtered.bag"/>
<param name="/use_sim_time" value="true" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename sz.lua"
output="screen">
<remap from="scan" to="front_scan" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
<node name="playbag" pkg="rosbag" type="play"
args="--clock $(arg bag_filename)" />
</launch>然后是编写lua配置文件
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "front_laser",
published_frame = "front_laser",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_pose_extrapolator = true,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 8.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1
POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65
return options其中tracking_frame 指的是全部转到这个坐标系下,因为这里使用的是纯laser建图,如果有imu的话可以改成imu的frame_id,一般是imu_link
published_frame指的是发布的话题tf: map -> front_laser
附:
lua参数解析
https://blog.csdn.net/YiYeZhiNian/article/details/131774720
坐标系转换,rosbag
https://blog.51cto.com/u_14355665/6099741
cartographer保存2d地图
https://blog.csdn.net/jiesunliu3215/article/details/124359333